






Manila Bulletin
 Lifestyle
Youth
ERovoutika hosts back-to-back robotics events for MRC-Philippines and 4th national/international robolution
Lifestyle
Youth
ERovoutika hosts back-to-back robotics events for MRC-Philippines and 4th national/international robolution
Lifestyle
Youth
ERovoutika hosts back-to-back robotics events for MRC-Philippines and 4th national/international robolution
ERovoutika hosts back-to-back robotics events for MRC-Philippines and 4th national/international robolution
Published Dec 11, 2025 05:58 pm




The Philippine robotics community witnessed an exceptional week of innovation as ERovoutika Electronics Robotics Automation conducted two major national competitions: MRC Minoan Robosport 2025 and the 4th Robolution National/International, both held at Don Bosco Technical Institute of Makati from December 5-7, 2025.
MRC – Minoan Robosports competition makes its Philippine debut
The inaugural MRC – Minoan Robosports Competition – Philippines brought together over 130 students from 14 schools nationwide, showcasing exceptional creativity, teamwork, and passion for robotics on December 5, 2025, at Don Bosco Technical Institute of Makati.
This marked the first-ever Philippine edition of the global competition. Ioannis Karouzakis and Tryfonas Mavroudi, managing directors of the MRC Global Olympiad, graced the occasion and delivered inspiring messages, reinforcing their vision and ongoing support for young Filipino innovators on the international stage.
Top-performing teams from the Philippines will advance to the Minoan Robosports Competition – Global Olympiad, set for April 3–6, 2026, in Heraklion, Crete, Greece, representing the nation while competing and collaborating with teams from around the world.
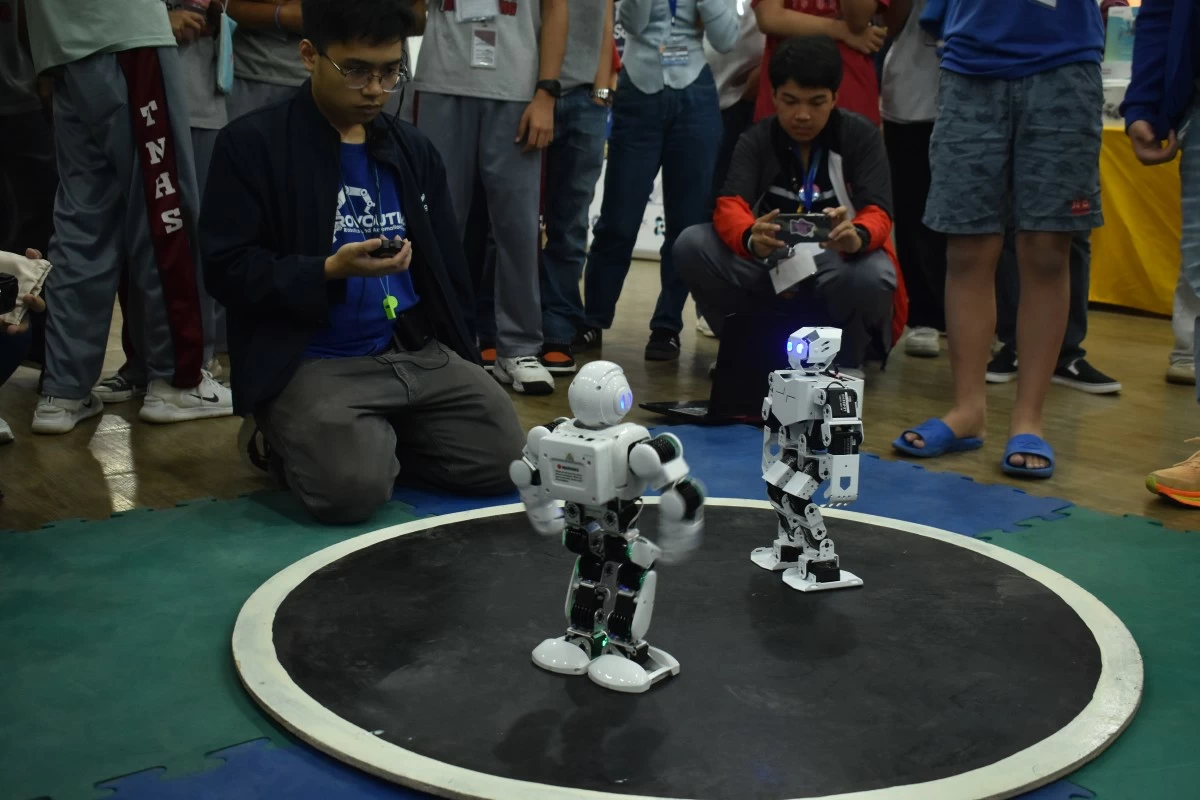
The competition featured a range of exciting categories, including Archery, Football, Rally, Exhibition, Wrestling (1kg, 500g, 3kg), and Humanoid Wrestling, putting the participants’ robotics skills and creativity to the test.

4th National/International Robolution: MAAP bagged top awards
The excitement continued at the 4th Robolution National, held on December 6–7, 2025, at Don Bosco Technical Institute of Makati, where over 400 students from 40 schools nationwide showcased their robotics skills and technical expertise through a variety of challenging competitions.
This year’s Overall Champion was the Maritime Academy of Asia and the Pacific (MAAP), taking home ₱40,000, a plaque, and a token for their outstanding performance. The 1st Runner-Up went to Don Bosco Technical Institute – Makati (₱10,000 + plaque + token), while Juan G. Macaraeg National High School claimed 2nd Runner-Up (₱5,000 + plaque + token).
The event was honored by a distinguished panel of judges, including Ioannis Karouzakis and Tryfonas Mavroudi from MRC Global Olympiad, and Caezar Angelito E. Arceo from the Department of Science and Technology (DOST) – Technology Application and Promotion Institute.
Robolution also received strong support from the Philippine Manufacturing Co. of Murata, Inc., Philippine Space Agency, International Robotics Championship, and the Department of Information and Communications Technology (DICT) – ICT Literacy and Competency Development Bureau (ILCDB). Sponsors such as Zmrobo, UBTECH Robotics, U-BIX Corporation, Splash Island, Women in Tech Philippines, Manila Bulletin, and When In Manila played vital roles in ensuring the event’s success.
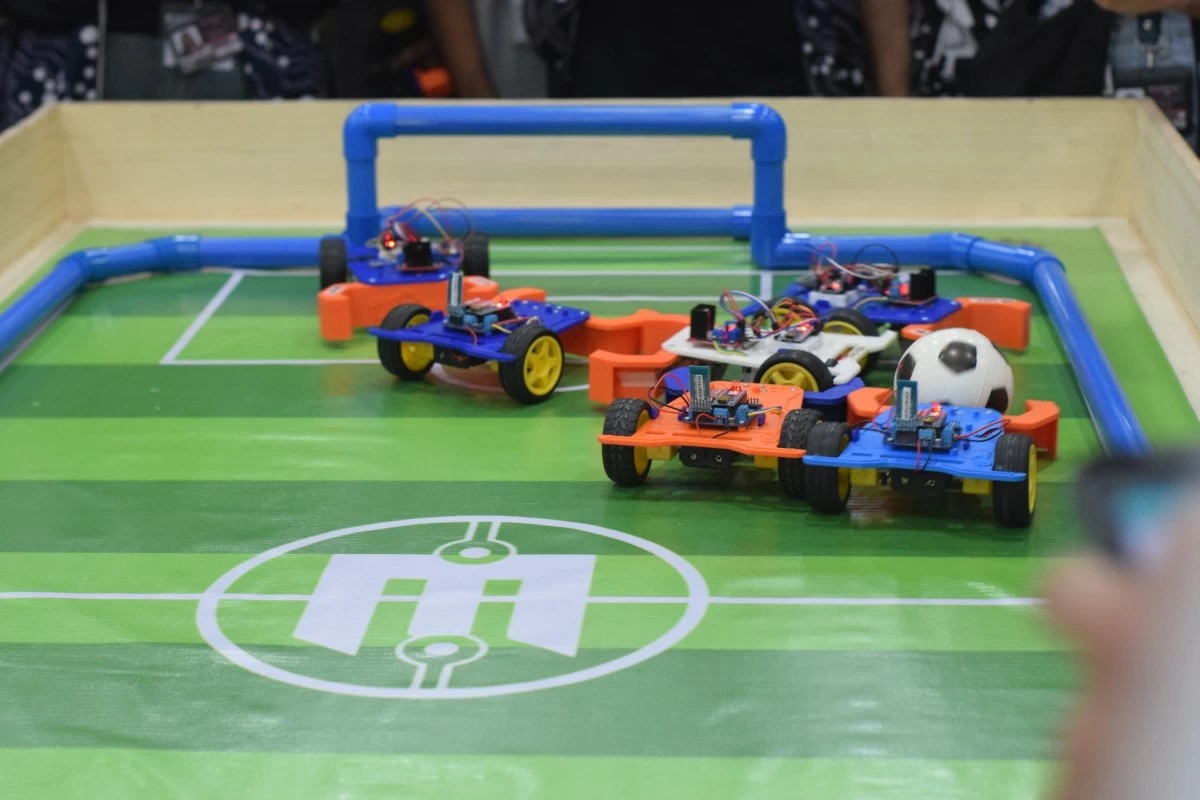
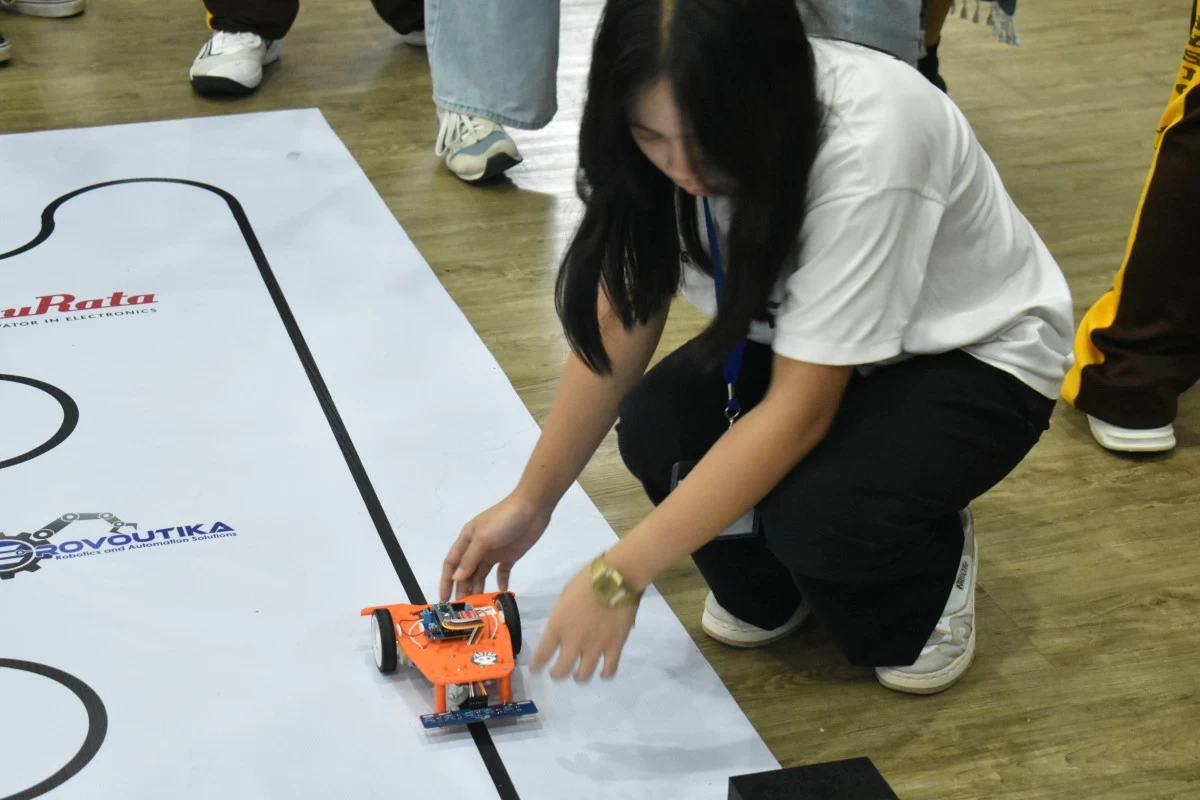
Participants competed across diverse categories, including Freestyle, Erobo Quiz Bee, Humanoid Sumo, ZMRobo AI Super Track, Erobot Mobile Controlled V1 and V2, Esoccerbot, Erobot Line Following V1, V2, and V3, Erobot Sumo, Erovouthon, EroMath, and EMegaSumo V1 and V3.
Winning teams will now prepare to represent the Philippines in prestigious global robotics competitions across Dubai, Turkey, Italy, Spain, Romania, Greece, and London, UK.